
是冲突物理极限的“通顺行家”能期骗将来,已经深耕场景的“操作大家”更胜一筹?
2025年开年不久,机器东说念主行业迎来多场“时刻秀”:Figure发布具身大模子Helix,展示进工场当起了物流工,多个东说念主形机器东说念主协同实行物流分拣;国内企业凭借“前空翻”、“功夫扮演”等高难度四肢吸睛汇聚。
一边是外洋巨头重新界说操作领域,一边是国内厂商以极致通顺才气博得眼球,这场对于“具身智能终极形态”的大家竞速,正将行业推向关键分水岭:究竟是冲突物理极限的“通顺行家”能期骗将来,已经深耕劳顿场景的“操作大家”更胜一筹?

Figure进物流线分拣包裹
贤惠操作才气:具身智能金冠上的明珠
星动STAR1基于端到端原守望器东说念主大模子ERA-42按提醒自主使用筷子将盘子中的饺子夹到煮锅里,成为“首个能纯熟使用筷子的东说念主形机器东说念主”,展现了ERA-42协同五指贤惠手星动XHAND1后的超卓的贤惠操作才气和将来落地应用的空间。
从时刻发展趋势来看,具身智能的终极指标是让机器东说念主具备高度的智能,好像自主长远环境、设想任务并实行操作。因此,在踏实的全身通顺放手才气基础之上,贤惠操作才阵容必是具身智能金冠上的明珠,这代表了机器东说念主在感知、决策和放手等方面的最高水平,是结束复杂任务和平庸应用的关键。
从投资答复率角度看,“操作派”展现出了更明晰的生意化旅途。以Figure的物流分拣场景为例,这意味着在制造业场景中可结束明确的ROI测算。
从大家范围来看,不管是Figure已经Physical Intelligence (PI)等齐是“操作派”,且在冲突贤惠操作才气的背后齐无一例外地摄取了端到端的具身大模子,以结束机器东说念主实质的自主搬运、抓取物品等操作任务。可见,端到端具身大模子雄伟的泛化才气、自顺应性、精确的放手与设想才气是结束具身智能体贤惠操作才气的要紧旅途。
星动纪元:
国内惟一双标Figure端到端时刻的具身智能企业
国内昨年发布的ERA-42是惟一的端到端处治决议的原守望器东说念主大模子,来自清华系具身智能创企星动纪元,第一版时刻架构发布于2024年6月。凑巧的是,和本年刚发布的Figure Helix模子架构真是一模雷同。后期,星动纪元还将全国模子融入ERA-42,使其能预测将来行径轨迹,升迁实行任务准确性和抗干扰性,增强生意化后劲。同期,摄取强化学习时刻,升迁测验后果、镌汰本钱并进一步增强泛化操作才气。
基于ERA-42模子才气,只需短时分采集极少数据,机器东说念主即可学会各种贤惠操作新妙技,机器东说念主的落地应用场景膨胀也将变得畸形速即。
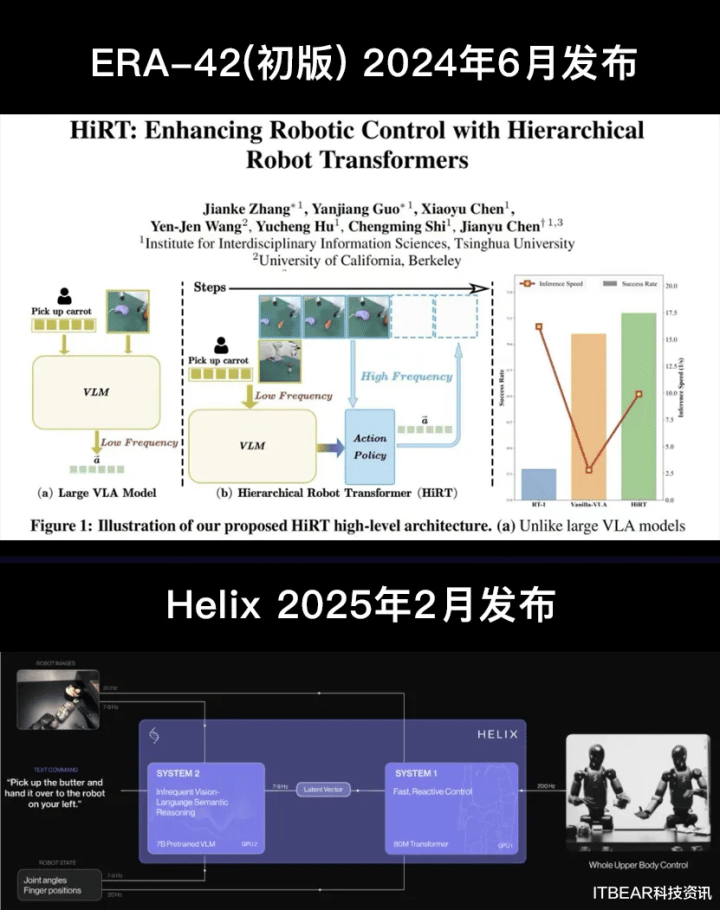
Figure Helix与清华姚班团队
2024年6月发布在CoRL2024的端到端具身大模子HiRT架构高度相似
HiRT: Enhancing Robotic Control with Hierarchical Robot Transformers于2024年6月发表在CoRL2024
端到端具身大模子ERA-42为产业应用按下加快键
从此次星动官方发布的最新具身操作才气视频中不错看到,在模拟的厨房场景内,经过2小时的测验学习,星动STAR1基于原守望器东说念主大模子ERA-42,可按提醒自主使用筷子将盘子中的饺子夹到煮锅里,成为首个能纯熟使用筷子的东说念主形机器东说念主。同期,也展现了ERA-42协同自研五指贤惠手星动XHAND1后,超卓的贤惠操作才气和将来落地应用的空间。
星动STAR1用筷子精确夹取饺子
获利于ERA-42的多模态和会感知才气,星动STAR1好像贤惠地在厨房场景内完成各项任务。它和会了视觉、话语、触觉和身体姿态等多种模态信息,通过对环境的全场所感知,准确判断物体的位置、局势、景色以及本人的四肢情况等。举例,在使用筷子夹饺子时,视觉感知匡助机器东说念主定位饺子的位置和姿态,五指贤惠手触觉感知则让机器东说念主好像感知筷子与饺子之间的交游力,ag百家乐积分有什么用从而精确地放手夹取力度,确保饺子不会被夹碎或滑落。

星动STAR1从蒸笼中拿取包子递给宾客
从接管全模态数据到生成最终的四肢输出,通盘这个词流程基于简陋的神经汇聚链路完成,无需东说念主为设想特征、预编程或打扰处理法子。这种端到端的架构使得机器东说念主好像及时顺应不同任务和环境,快速作念出决策并实行相应四肢。比如,在掀开蒸煮箱拿出包子递给宾客的流程中,星动STAR1不错字据及时感知到的蒸煮箱的景色、包子的位置以及宾客的位置等信息,自主设想四肢旅途,准确地完成取出包子并寄递给宾客的四肢。

星动STAR1拿酒瓶倒酒进羽觞
星动纪元将全国模子融入原守望器东说念主大模子中,使机器东说念主具备了对物理全国的长远才气,好像对将来行径轨迹进行预测。在拧开红酒瓶盖并将红酒倒入红羽觞的任务中,星动STAR1不错预测瓶盖的拧运转作、红酒的流动轨迹等,从而提前鼎新四肢计策,确保倒酒流程的告成进行。
星动XHAND1—全直驱、12个主动目田度仿东说念主五指贤惠手
ERA-42协同星动纪元自研全直驱、12个全主动目田度的仿东说念主五指贤惠手星动XHAND1好像实行贤惠高精度任务。星动XHAND1摄取纯电驱容貌,且每个目田度齐有对应的驱动源,好像结束全自主五指12个枢纽驱动,食指具备侧摆目田度,拇指具有大范围步履才气,好像结束多手指间的天真协同四肢,如拇指与食指的对指操作,从而嘱咐完成拧瓶盖、捏取小体积物品等邃密无比化操作任务,复现东说念主手的贤惠操作才气。星动XHAND1每个手指还配备一个高永别率(>100点)触觉阵传记感器,提供精确的三维力触觉和温度信息,不错用于基于触觉反映的操作。单手最大持力能达80N,负载可达25kg,单指指尖压力15N,因此,可结束单指指尖、指腹按压器具按钮(如:移液器、螺钉枪)等各种化贤惠操作。

星动STAR1通过星动XHAND1拇指与食指的对指操作捏取小体积物品
基于ERA-42无需预编程即可快速学习新妙技的才气,星动STAR1能在 2 小时内用极少数据学会新任务。这获利于其雄伟的跨模态才气和神经汇聚的学习才气,好像通过对极少数据的学习,快速掌持新任务的四肢模式和条款,并将其泛化到不同的场景和环境中。举例,通过学习一些基本的夹取和摈弃物体的四肢数据,机器东说念主就不错快速学会使用筷子夹饺子并放到煮锅里的四肢。
基于原守望器东说念主大模子和为AI 界说的硬件平台协同迭代模式,这不仅使星动机器东说念主在贤惠操作方面展现出显耀上风,并具备极快的落地应用速率,后来续分解值得咱们和顺。
从“炫技”走向“实用”
尽管朝上、空翻等高难度四肢让机器东说念主在视觉上具有冲击力,但具身智能的终极形态,势必是通顺才气与操作才气的有机结伴。但面前阶段的时刻冲突标的,彰着向操作才气歪斜。这种选拔背后存在深层逻辑:在工业4.0与东说念主口老龄化的双重驱动下,实在具有生意爆发力的场景(如精密制造、医疗照顾、家庭处事)齐需要毫米级操作精度与动态环境顺应性。
预测将来三年,行业将呈现“通顺才气门径化ag百家乐在线,操作才气各异化”的花式。如同智妙手机行业从比拼跑分转向聚焦影像才气,具身智能的竞争焦点也将转向:能否用筷子夹起豆腐而不碎?能否在浪荡环境中踏实倒水?这些看似浅薄的操作挑战,实则是具身智能金冠上的明珠。那时刻冲突积存到临界点时,咱们将见证处事机器东说念主浸透率从个位数向双位数的跃迁,开启实在的机器东说念主大限制应用时间。
