
【文/不雅察者网专栏作家 白玉京】
12月30日的夜晚,是一个让无数印度东谈主昂然、狂欢的不眠之夜。
这整夜,印度向行家直播初度天应答会对接任务(SpaDeX)的火箭辐射任务。淌若对接实验奏效,印度将成为行家第四个掌持天应答会对接本领的国度。

印度的历史性一刻,闪耀火箭的PSLV-C60字样,将达成印度天外对接的梦思。图片起原:ISRO
伙同筹谋交会对接
载东谈主航天的三大枢纽本领是天应答会对接、载东谈主天地往来和出舱动作。对载东谈主航天有着狂热执着和长久贪图的印度这次初度天外对接,就是为印度将来实施载东谈主航天任务、建造印度我方的空间站、乃至载东谈主登月作准备。
1966年3月,好意思国双子星8号飞船与阿金纳筹谋摇荡器对接,完成历史上初度天外对接;1967年10月,苏联天地188号飞船与天地186号飞船达成了寰球上初度无东谈主自动交会对接;2011年11月,中国神舟八号和玉阙一号达成了自动交会对接。尽管日本的HTV和欧洲的ATV这两款飞船,跟好意思国主导建造的海外空间站完成了对接,但也仅仅个半曲调,不掌持全套中枢本领。
印度对初度天外对接试验委用厚望的同期,也信心满满,进展了一箭多星天外种土豆的精神,但愿一次辐射全面丰充。PSLV-C60火箭的主任务是辐射两颗各约220公斤的袖珍航天器,区分为SDX01(跟踪摇荡器)和SDX02(筹谋摇荡器)。必须闪耀,这两个航天器并非一次性用品。

印度SDX01(跟踪摇荡器)和SDX02(筹谋摇荡器),闪耀对接机构相对。图片起原:ISRO
PSLV火箭的实用价值被充分榨干,将载有24项科学载荷火箭,火箭实质的第四级,被称为PS4轨谈实验舱,成为考据载荷的实验平台。
印度初度天外对接要点考据伙同筹谋交会对接,也可能会考据非伙同筹谋交会对接。伙同与非伙同其实很好交融,平庸来说,两个航天器有自主配合才调的就是伙同,其中一方莫得这个才调的就是不对作,比如好意思国航天飞机拿获天外望镜进行维修,或是中国曾用一颗卫星拿获另一颗卫星拖到天外墓地轨谈。
咱们先聊聊伙同筹谋交会对接,一般来说分为远距离诱掖段、近距离诱掖段、靠拢段和对接段。印度初度天应答会对接试验经由如下:
PSLV-C60火箭将两个航天器送入高度约470公里、倾角55°的圆形轨谈。
通过精准适度,辐射时为筹谋和跟踪航天器提供眇小的相对速率,使它们在一天内达到10-20公里的互相间距。
随后,跟踪航天器将稳当接近筹谋航天器,经过5公里、1.5公里、500米、225米、15米和3米的距离,最终达成对接。
奏效对接并固定后,将演示两颗卫星之间的电力传输,然后分离,驱动各自的灵验载荷操作,预期任务寿命可达两年。
这次将考据的中枢本领,包括不限于:
· 对接机构
印度的对接机构是一种低冲击对接系统,接近速率约为10毫米/秒,领受“异体同构”假想,即跟踪航天器和筹谋航天器的对接系统疏通,何况是刻下海外主流的足下式对接系统。好意思苏古早的环-锥式和杆-锥式早已淘汰,足下式对接系统的克己是通用性好,两个航天器对接装配疏通,分娩小器特地便利。
在实行天外任务时,淌若不同航天器齐领受这种通用的足下式对接系统,那么它们之间互相对接的可能性和便利性就大大加多,无需针对特定对接对象去挑升校正或配备迥殊对接开发,就如同使用妥洽接口法子的插头和插座不异,不同开发间更容易汇聚配合。中好意思俄的对接系统移动通谈直径约800毫米,印度试验型的对接系统直径约450毫米。

对接机构特写,可见“异体同构”假想。图片起原:ISRO
· 交会与对接算法
SDX01和SDX02距离达到5公里时,会领受印度空间商榷组织低地球轨谈航天器中所愚弄的法子轨谈保管和姿态适度算法。由于航天器处于圆形轨谈,对卫星速率的任何增减齐会导致轨谈变化,因此领受了基于多脉冲(n-Pulse)、下滑谈(Glideslope)以及比例诱掖(PV)制导算法的V-bar计策,以松开卫星间的距离,在固定的卫星间距离处保持相识,以便对传感器和软件进行评估,最终达成对接。这些算法被转动为软件,用于达成交会和对接。
· 航天器定位
SDX01和SDX02齐搭载了基于差分行家导航卫星系统的卫星定位系统,提供定位、导航与授时功能。通过对跟踪航天器和筹谋航天器的SPS接管机中来自疏通业家导航卫星系统卫星的载波相位测量值作念减法运算,便可详情这两颗卫星高度精准的相对景况。SDX01和SDX02的甚高频/特高频收发器通过星间链路,将行家导航卫星系统卫星的测量数据从一颗卫星传输至另一颗卫星。
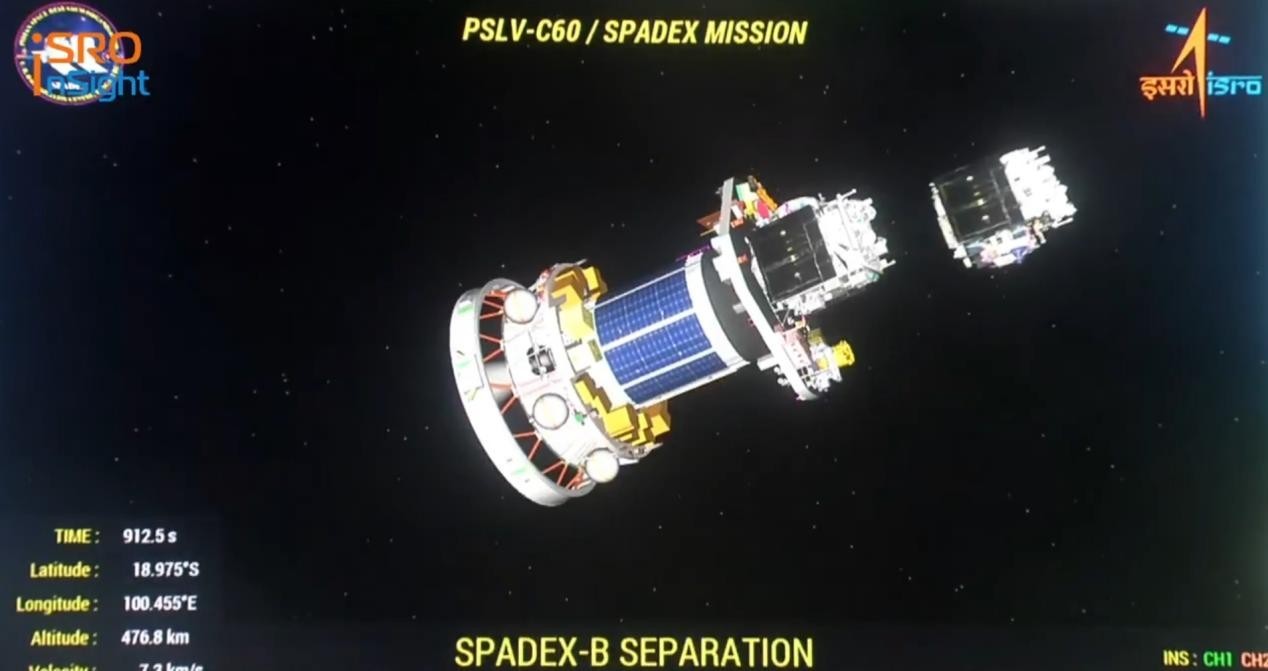
印度SDX01和SDX02分离奏效。 图片起原:ISRO
非伙同筹谋交会对接
这次印度考据非伙同筹谋交会对接,真是是让东谈主刮目相看。非伙同筹谋交会对接的难度和复杂度要大得多。这种情况下,筹谋航天器并不是为对接任务假想的,可能根蒂莫得法子的对接接口,沙巴贝投ag百家乐也莫得才调精准休养姿态,而且卫星碎屑等天外垃圾的轨谈参数、质料结构齐不一定明确可知。
机械臂曲直伙同筹谋交会对接的枢纽开发之一。可用于筹谋拿获与抓取、姿态休养接济和近距离操作保险。机械臂一般有着多个解放度的枢纽,不错在三维空间中达成多种复杂的开放姿态组合,其假想相配复杂,研发难度比较高。
比如加拿大为海外空间站研制的“加拿大臂2”有7个解放度,这使其或者像东谈主的手臂不异活泼地转折、扭转、伸展,从而恰当不同风光、不同姿态非伙同筹谋的抓取和操作需求,或者到达跟踪航天器足下不同方向去完成任务。中国在玉阙空间站部署的一大一小机械臂水平也相配高,不光不错在舱体爬行,双臂致使不错协同责任。
PSLV-C60任务中POEM-4上的24个灵验载荷,名次前二的就是RRM-TD行走机械臂和天外碎屑拿获机械手。RRM-TD是印度第一台具有行走才调的天外机械臂,也有7个解放度,可爬行到指定位置。天外碎屑拿获机械手利用视觉伺服和物体开放算计来拿获系绳汇聚的碎屑。在初度实验奏效演示之后,夙昔将具备拿获解放漂荡碎屑,以及为系绳汇聚妥协放漂荡的航天器进行燃料加注的才调。
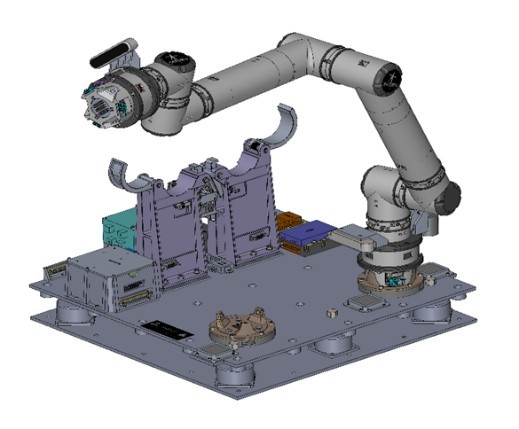

上图为RRM-TD行走机械臂,下图为天外碎屑拿获机械手。图片起原:ISRO
印度关于遥感极其醉心
印度一直但愿在天外部署苍劲的合成孔径雷达与光学成像相结合的遥感星座,弘大的民用和军用价值可想而知。SDX01和SDX02在完成对接和分离操作之后,将实行后续的天外任务,举座倾向于考核、遥感。
SDX01上搭载的高分辨率相机(HRC),凭借其在特定高度下具有一定尺寸的瞬时视场角以及不同时势下相应的幅宽,或者对筹谋区域进行拍摄成像,可用于获得大地等筹谋的关连影像信息,从这个角度讲具备访佛考核、遥感功能。
SDX02上搭载的微型多光谱灵验载荷(MMX),有着特定波段范围的可见近红外波段,何况在相应高度下有对应的瞬时视场角和幅宽,这种多光谱成像才调有助于对当然资源、植被等情况进行不雅测和分析,也适合常见遥感任务的限度。
还有两个载荷跟合成孔径雷达相关。GLX-SQ技俩用于演示在天外环境中合成孔径雷达(SAR)图像的生成、蚁合以及惩办过程。其筹谋是在10分钟以内完成图像惩办和压缩责任,将400兆字节的原始数据压缩至不及1.5兆字节。
伐楼拿技俩(Varuna,印度掌控次第与水的神)考据立方体卫星的合成孔径雷达才调。单个袖珍立方体卫星的合成孔径雷达性能虽然比不外专科的大卫星,可是其造价极其便宜,组网以后性能特地可不雅。通过组网变成卫星星座,不错加多剧访率,也就是对吞并区域或者更时时地进行不雅测成像,达成对筹谋区域的近及时、全方向监测。
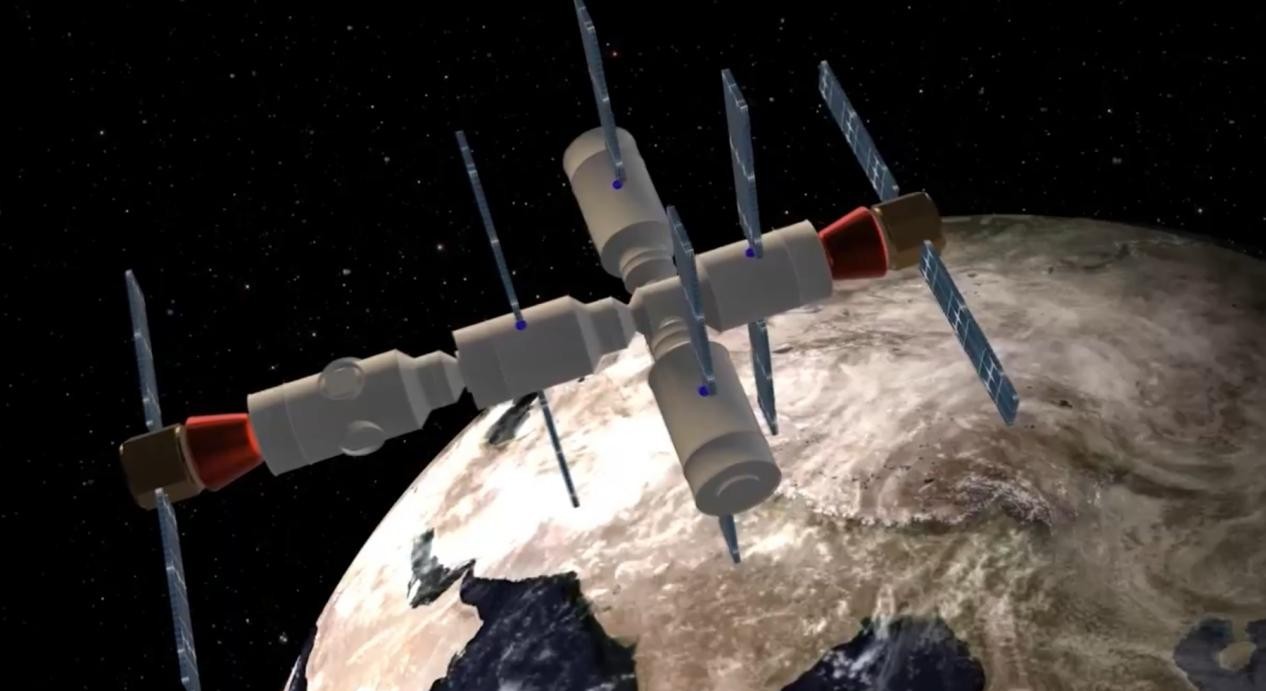
印度要造空间站,天应答会对接是必修课。图片起原:ISRO
奈何评价印度的初度
好意思俄的初度,现来看来毕竟原始,虽然无法用上星间链路和差分行家定位导航系统这些高新本领。跟好意思俄中的初度比拟,印度的初度天外对接试验,吃了期间本领超过的红利,总体水平不算太低,很有印度式量入计出作风。比如与海外主流接轨的足下式假想,在一定进程上反应了印度航天本领的当代化水温煦海外恰当性,为夙昔与其他国度开展航天伙同或海外空间站对接任务提供了本领接口的可能性。
通过这次试验,印度在航资质源利用上达到了新的高度,PSLV-C60火箭的多功能应用,从单纯的输送器具转机为集辐射、实验平台于一体的详细平台,大幅升迁了航天任务的性价比,为自后续航天技俩的经济可行性提供了邃密模范。
更为枢纽的是,这次试验精采契合载东谈主航天发展条理,伙同与非伙同筹谋交会对接本领的考据,是印度迈向载东谈主航天实质性阶段的迫切里程碑,为印度自主建筑空间站和开展载东谈主登月筹谋筑牢了前期本领根基。
印度这次天外对接虽取得阶段性终结,但也需澄莹意志到其航天之路仍布满梗阻。过往训诫标明,印度在军工和科研技俩上常受延期困扰,阿琼坦克与LCA交游机即是例证。航天畛域本领复杂进程更甚,后续任务挑战重重。
尽管这次展示了一定本领实力,但在永远相识鼓励天外技俩、确保本领不竭升级以及大规模应用转动等方面,印度仍需插足多数元气心灵,接管时分与本质的严格训练,其能否真真是行家航天竞争中站稳脚跟并达成长久筹谋,尚有待进一步不雅察,夙昔充满不祥情趣与忙碌迂回。

本文系不雅察者网独家稿件,著述内容闇练作家个东谈主不雅点AG百家乐怎么玩才能赢,不代表平台不雅点,未经授权,不得转载,不然将讲求法律包袱。温雅不雅察者网微信guanchacn,逐日阅读道理著述。